
Page 75 - CNC Robotics
P. 75
,--------------------------~--
CNC Robotics
APPLICATION NOTE
bridge transist~rs will be forward biased by the
In general the best performance, in terms of
torque, is achieved using the chopping current ~ransformer action of the motor windings , provid-
control technique [2]. This technique also allows In9 an effective short circuit across the supply.
easy implementation of multiple current level Secondlythe L298N , even though it has split sup-
drive techniques to improve the motor perform- ply voltages , may not be used without a high volt-
ance. [1] age supply on the chip since a portion of the drive
current for the output bridge is derived from this
supply .
Driving a Unipolar Motor with the l 298N or
L6202
Selecti ng Enable or Pha se chopping
Although it is not the optimal solution, design con-
straints sometimes limit the motor selection, In Whe!1 implementing chopping control of the cur-
t~e ca~e where the designer is looking for a rent In a stepper motor , there are several ways in
highly Integrated driv~ stage ~ith improved per- which the current control can be implemented. A
formance over previous des igns but is con- bridqe output, like the L6202 or L298N, may be
strained to d~ive a unipolar wound (6 leaded) mo- driven In enable choppinq, one phase chopping or
to~ It IS possible to drive the motor with H-Briclge two p~ase chopping , as shown in Figure 6. The
drivers like the l298N or L6202. To drive such a L297 I,mplements enable chopping or one phase
motor the center tap of the motor should be left choPPII:'!g, selected by the control input. The
unconnected and the two ends of the common L6506 Implements one phase chopping, with the
winding,s ar~ connected to the ~ridge outputs, as recirculation path around the lower half of the
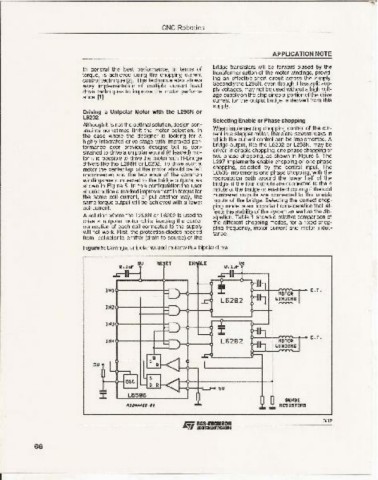
show n In Figure 5. In this configuration the user bridge , if the four outputs are connected to the 4
should notice a marked improvement in torque for inputs of the bridge or enable chopping if the odd
numbered outputs are connected to the enable
the same coil current, or put another way, the
same torque output will be achieved with a lower inputs of the bridge . Selecting the correct chop-
coil current. ping mode is an important consideration that af-
fects the stability of the system as well as the dis-
A solution where the L298N or L6202 is used to sipatio n. Table 1 shows a relative comparison of
drive a unipolar motor while keeping the center the different chopping modes, for a fixed chop-
c,?nnection of each coil connected to the supply ping frequency, motor current and motor induc-
Will not work. First, the protection diodes needed tance .
from collector to emitter (drain to source) of the
Figu re 5: Driving a unipolar wound motor with a bipolar drive
U
50 RESET ENABLE B.1UFvT~
,;,'~-:r ...-I: I
--< HI-,
I H, ~ MOTORT C. T.
-i HI-,
1.,.;-< L62eJ2 rwlHDING
IH2
>=I
IH3 1:-
H ~
'----<
I H. L62eJ2 MOTORT C. T.
:3 ... .....1-] UINDING
eJ-< >-
5U
~ I • L
B'~-:I 5U
•
Q
:f L6596 .....
SENSE
1I!13111U.,·.1 . 1. .-. ~ RESI STORS
3/12
66
, - - - - - - - - - - - - - - - - - - - - -