
Page 237 - Cam Design Handbook
P. 237
THB8 9/19/03 7:25 PM Page 225
CAM MECHANISM FORCES 225
Motor Clutch-brake
unit
Worm gear
Cam
Follower Load
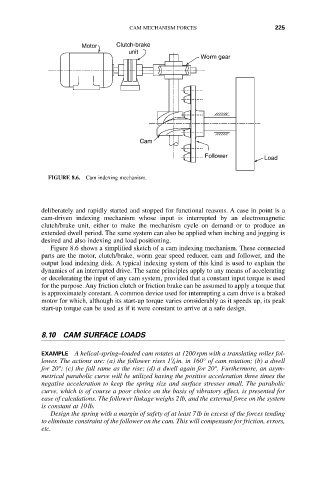
FIGURE 8.6. Cam indexing mechanism.
deliberately and rapidly started and stopped for functional reasons. A case in point is a
cam-driven indexing mechanism whose input is interrupted by an electromagnetic
clutch/brake unit, either to make the mechanism cycle on demand or to produce an
extended dwell period. The same system can also be applied when inching and jogging is
desired and also indexing and load positioning.
Figure 8.6 shows a simplified sketch of a cam indexing mechanism. These connected
parts are the motor, clutch/brake, worm gear speed reducer, cam and follower, and the
output load indexing disk. A typical indexing system of this kind is used to explain the
dynamics of an interrupted drive. The same principles apply to any means of accelerating
or decelerating the input of any cam system, provided that a constant input torque is used
for the purpose. Any friction clutch or friction brake can be assumed to apply a torque that
is approximately constant. A common device used for interrupting a cam drive is a braked
motor for which, although its start-up torque varies considerably as it speeds up, its peak
start-up torque can be used as if it were constant to arrive at a safe design.
8.10 CAM SURFACE LOADS
EXAMPLE A helical-spring–loaded cam rotates at 1200rpm with a translating roller fol-
1
lower. The actions are: (a) the follower rises 1 / 4 in. in 160° of cam rotation; (b) a dwell
for 20°; (c) the fall same as the rise; (d) a dwell again for 20°. Furthermore, an asym-
metrical parabolic curve will be utilized having the positive acceleration three times the
negative acceleration to keep the spring size and surface stresses small. The parabolic
curve, which is of course a poor choice on the basis of vibratory effect, is presented for
ease of calculations. The follower linkage weighs 2lb, and the external force on the system
is constant at 10lb.
Design the spring with a margin of safety of at least 7lb in excess of the forces tending
to eliminate constraint of the follower on the cam. This will compensate for friction, errors,
etc.