
Page 451 - Cam Design Handbook
P. 451
THB13 9/19/03 7:56 PM Page 439
CAM SYSTEM DYNAMICS—RESPONSE 439
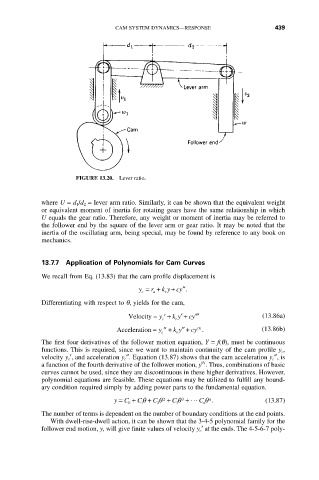
FIGURE 13.20. Lever ratio.
where U = d 1/d 2 = lever arm ratio. Similarly, it can be shown that the equivalent weight
or equivalent moment of inertia for rotating gears have the same relationship in which
U equals the gear ratio. Therefore, any weight or moment of inertia may be referred to
the follower end by the square of the lever arm or gear ratio. It may be noted that the
inertia of the oscillating arm, being special, may be found by reference to any book on
mechanics.
13.7.7 Application of Polynomials for Cam Curves
We recall from Eq. (13.83) that the cam profile displacement is
y = r + k y cy¢¢.
+
c a r
Differentiating with respect to q, yields for the cam,
Velocity = y ¢ + k y ¢ + cy ¢¢¢ (13.86a)
c r
IV
Acceleration = y ¢¢ + k y ¢¢ + cy . (13.86b)
c r
The first four derivatives of the follower motion equation, Y = f(q), must be continuous
functions. This is required, since we want to maintain continuity of the cam profile y c,
velocity y c ¢, and acceleration y c ≤. Equation (13.87) shows that the cam acceleration y c ≤, is
IV
a function of the fourth derivative of the follower motion, y . Thus, combinations of basic
curves cannot be used, since they are discontinuous in these higher derivatives. However,
polynomial equations are feasible. These equations may be utilized to fulfill any bound-
ary condition required simply by adding power parts to the fundamental equation.
q
y = C + C + C q 2 + C q 3 + ◊◊◊ C q . (13.87)
n
0 1 2 3 n
The number of terms is dependent on the number of boundary conditions at the end points.
With dwell-rise-dwell action, it can be shown that the 3-4-5 polynomial family for the
follower end motion, y, will give finite values of velocity y c ¢ at the ends. The 4-5-6-7 poly-