
Page 53 - Classification Parameter Estimation & State Estimation An Engg Approach Using MATLAB
P. 53
42 DETECTION AND CLASSIFICATION
detector actuator
acquisition
accepted
valve
conveyor
refused
Figure 2.14 Quality inspection system for the recycling of bottles
(a) (b)
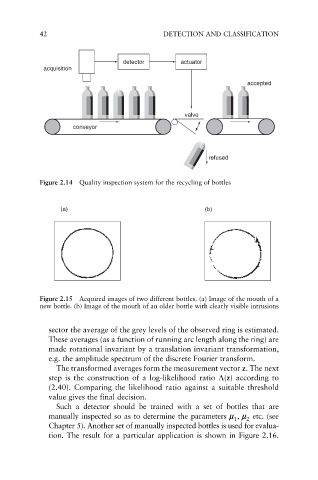
Figure 2.15 Acquired images of two different bottles. (a) Image of the mouth of a
new bottle. (b) Image of the mouth of an older bottle with clearly visible intrusions
sector the average of the grey levels of the observed ring is estimated.
These averages (as a function of running arc length along the ring) are
made rotational invariant by a translation invariant transformation,
e.g. the amplitude spectrum of the discrete Fourier transform.
The transformed averages form the measurement vector z. The next
step is the construction of a log-likelihood ratio L(z) according to
(2.40). Comparing the likelihood ratio against a suitable threshold
value gives the final decision.
Such a detector should be trained with a set of bottles that are
manually inspected so as to determine the parameters m , m etc. (see
2
1
Chapter 5). Another set of manually inspected bottles is used for evalua-
tion. The result for a particular application is shown in Figure 2.16.