
Page 322 - Control Theory in Biomedical Engineering
P. 322
296 Control theory in biomedical engineering
+
–
+
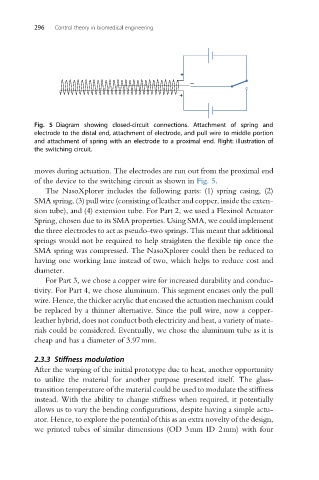
Fig. 5 Diagram showing closed-circuit connections. Attachment of spring and
electrode to the distal end, attachment of electrode, and pull wire to middle portion
and attachment of spring with an electrode to a proximal end. Right: illustration of
the switching circuit.
moves during actuation. The electrodes are run out from the proximal end
of the device to the switching circuit as shown in Fig. 5.
The NasoXplorer includes the following parts: (1) spring casing, (2)
SMA spring, (3) pull wire (consisting of leather and copper, inside the exten-
sion tube), and (4) extension tube. For Part 2, we used a Flexinol Actuator
Spring, chosen due to its SMA properties. Using SMA, we could implement
the three electrodes to act as pseudo-two springs. This meant that additional
springs would not be required to help straighten the flexible tip once the
SMA spring was compressed. The NasoXplorer could then be reduced to
having one working lane instead of two, which helps to reduce cost and
diameter.
For Part 3, we chose a copper wire for increased durability and conduc-
tivity. For Part 4, we chose aluminum. This segment encases only the pull
wire. Hence, the thicker acrylic that encased the actuation mechanism could
be replaced by a thinner alternative. Since the pull wire, now a copper-
leather hybrid, does not conduct both electricity and heat, a variety of mate-
rials could be considered. Eventually, we chose the aluminum tube as it is
cheap and has a diameter of 3.97mm.
2.3.3 Stiffness modulation
After the warping of the initial prototype due to heat, another opportunity
to utilize the material for another purpose presented itself. The glass-
transition temperature of the material could be used to modulate the stiffness
instead. With the ability to change stiffness when required, it potentially
allows us to vary the bending configurations, despite having a simple actu-
ator. Hence, to explore the potential of this as an extra novelty of the design,
we printed tubes of similar dimensions (OD 3mm ID 2mm) with four