
Page 158 - Designing Sociable Robots
P. 158
breazeal-79017 book March 18, 2002 14:7
The Behavior System 139
9.4 Kismet’s Proto-Social Responses
In the current implementation of the behavior system there are three primary branches,
each specialized for addressing a different need. Each is comprised of multiple levels,
with three layers being the deepest (see figure 9.2). Each level of the hierarchy serves a
different function and addresses a different set of issues. As one moves down in depth, the
behaviors serve to more finely tune the relation between the robot and its environment, and
in particular, the relation between the robot and the human (Breazeal & Scassellati, 2000).
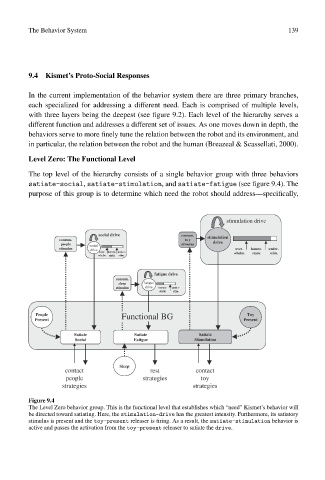
Level Zero: The Functional Level
The top level of the hierarchy consists of a single behavior group with three behaviors
satiate-social, satiate-stimulation, and satiate-fatigue (see figure 9.4). The
purpose of this group is to determine which need the robot should address—specifically,
stimulation drive
social drive consum. stimulation
consum. to y drive
people stimulus
social
stimulus over- homeo- under-
drive
over- homeo- under- whelm. static stim.
whelm. static stim.
fatigue drive
consum.
sleep fatigue
stimulus drive homeo- under-
static stim.
People Functional BG Toy
Present Present
Satiate Satiate Satiate
Social Fatigue Stimulation
Sleep
contact rest contact
people strategies toy
strategies strategies
Figure 9.4
The Level Zero behavior group. This is the functional level that establishes which “need” Kismet’s behavior will
be directed toward satiating. Here, the stimulation-drive has the greatest intensity. Furthermore, its satiatory
stimulus is present and the toy-present releaser is firing. As a result, the satiate-stimulation behavior is
active and passes the activation from the toy-present releaser to satiate the drive.