
Page 161 - Designing Sociable Robots
P. 161
breazeal-79017 book March 18, 2002 14:7
142 Chapter 9
Social Regulation BG
Intense Avoid
or Bad
Stimulus
Stim
Social Protective BG
Disgust Distress Fear
Reject
Undesire. Annoy. Withdraw Threat Escape
Toy Toy Stim Stim
No Good Escaped
Toy Stim Stim
[A, V, S] [A, V, S] [A, V, S]
Reject Withdraw Flee
Motor Skill Motor Skill Motor Skill
Request Request Request
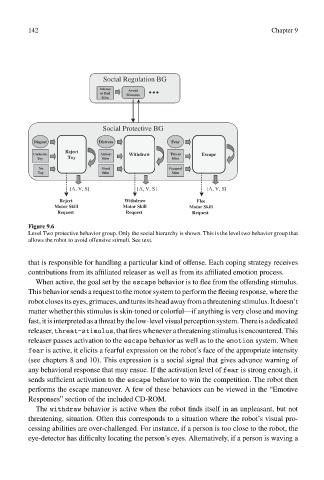
Figure 9.6
Level Two protective behavior group. Only the social hierarchy is shown. This is the level two behavior group that
allows the robot to avoid offensive stimuli. See text.
that is responsible for handling a particular kind of offense. Each coping strategy receives
contributions from its affiliated releaser as well as from its affiliated emotion process.
When active, the goal set by the escape behavior is to flee from the offending stimulus.
This behavior sends a request to the motor system to perform the fleeing response, where the
robotclosesitseyes,grimaces,andturnsitsheadawayfromathreateningstimulus.Itdoesn’t
matter whether this stimulus is skin-toned or colorful—if anything is very close and moving
fast,itisinterpretedasathreatbythelow-levelvisualperceptionsystem.Thereisadedicated
releaser, threat-stimulus, that fires whenever a threatening stimulus is encountered. This
releaser passes activation to the escape behavior as well as to the emotion system. When
fear is active, it elicits a fearful expression on the robot’s face of the appropriate intensity
(see chapters 8 and 10). This expression is a social signal that gives advance warning of
any behavioral response that may ensue. If the activation level of fear is strong enough, it
sends sufficient activation to the escape behavior to win the competition. The robot then
performs the escape maneuver. A few of these behaviors can be viewed in the “Emotive
Responses” section of the included CD-ROM.
The withdraw behavior is active when the robot finds itself in an unpleasant, but not
threatening, situation. Often this corresponds to a situation where the robot’s visual pro-
cessing abilities are over-challenged. For instance, if a person is too close to the robot, the
eye-detector has difficulty locating the person’s eyes. Alternatively, if a person is waving a