
Page 160 - Designing Sociable Robots
P. 160
breazeal-79017 book March 18, 2002 14:7
The Behavior System 141
Social
Drive
People Satiate
Present Social
Social Regulation BG Boredom Sorrow
Intense
or Bad No
Stimulus Good People
Avoid Engage Seek
Non- Stimulus People People People
Intense Found
Stim People
[A, V, S]
Search
Avoidance Engagement
Motor Skill
Strategies Strategies
Request
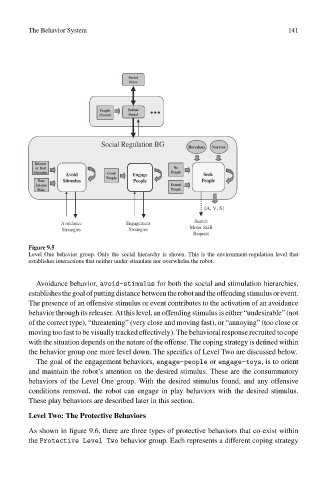
Figure 9.5
Level One behavior group. Only the social hierarchy is shown. This is the environment-regulation level that
establishes interactions that neither under-stimulate nor overwhelm the robot.
Avoidance behavior, avoid-stimulus for both the social and stimulation hierarchies,
establishesthegoalofputtingdistancebetweentherobotandtheoffendingstimulusorevent.
The presence of an offensive stimulus or event contributes to the activation of an avoidance
behavior through its releaser. At this level, an offending stimulus is either “undesirable” (not
of the correct type), “threatening” (very close and moving fast), or “annoying” (too close or
moving too fast to be visually tracked effectively). The behavioral response recruited to cope
with the situation depends on the nature of the offense. The coping strategy is defined within
the behavior group one more level down. The specifics of Level Two are discussed below.
The goal of the engagement behaviors, engage-people or engage-toys, is to orient
and maintain the robot’s attention on the desired stimulus. These are the consummatory
behaviors of the Level One group. With the desired stimulus found, and any offensive
conditions removed, the robot can engage in play behaviors with the desired stimulus.
These play behaviors are described later in this section.
Level Two: The Protective Behaviors
As shown in figure 9.6, there are three types of protective behaviors that co-exist within
the Protective Level Two behavior group. Each represents a different coping strategy