
Page 110 - Distributed model predictive control for plant-wide systems
P. 110
84 Distributed Model Predictive Control for Plant-Wide Systems
1
0.5
y 1
0
−0.5
5 10 15 20 25 30 35 40
Time (s)
1
0.5
y 2
0
−0.5
5 10 15 20 25 30 35 40
Time (s)
0.5
u 1 0
−0.5
5 10 15 20 25 30 35 40
Time (s)
2
1
u 2
0
−1
5 10 15 20 25 30 35 40
Time (s)
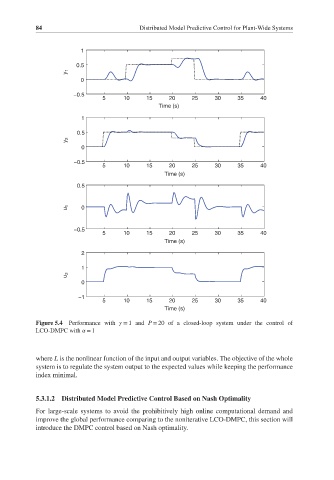
Figure 5.4 Performance with = 1and P = 20 of a closed-loop system under the control of
LCO-DMPC with = 1
where L is the nonlinear function of the input and output variables. The objective of the whole
system is to regulate the system output to the expected values while keeping the performance
index minimal.
5.3.1.2 Distributed Model Predictive Control Based on Nash Optimality
For large-scale systems to avoid the prohibitively high online computational demand and
improve the global performance comparing to the noniterative LCO-DMPC, this section will
introduce the DMPC control based on Nash optimality.