
Page 233 - Distributed model predictive control for plant-wide systems
P. 233
Cooperative Distributed Predictive Control with Constraints 207
0.5
Δu 1 0
–0.5
0 10 20 30 40 50 60 70 80
Time (s)
0.5
Δu 2 0
–0.5
0 10 20 30 40 50 60 70 80
Time (s)
0.5
Δu 3 0
–0.5
0 10 20 30 40 50 60 70 80
Time (s)
1
0.5
Δu 4 0
–0.5
0 10 20 30 40 50 60 70 80
Time (s)
0.5
Δu 5 0
–0.5
−1
0 10 20 30 40 50 60 70 80
Time (s)
0.5
Δu 6 0
–0.5
0 10 20 30 40 50 60 70 80
Time (s)
1
Δu 7 0
–1
0 10 20 30 40 50 60 70 80
Time (s)
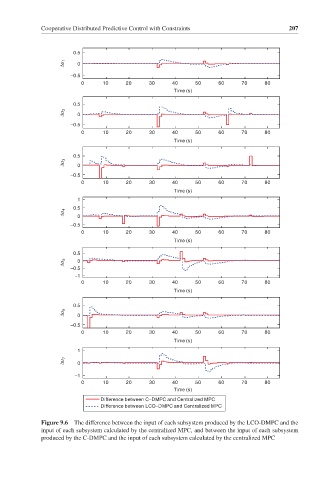
Difference between C−DMPC and Centralized MPC
Difference between LCO−DMPC and Centralized MPC
Figure 9.6 The difference between the input of each subsystem produced by the LCO-DMPC and the
input of each subsystem calculated by the centralized MPC, and between the input of each subsystem
produced by the C-DMPC and the input of each subsystem calculated by the centralized MPC