
Page 270 - Distributed model predictive control for plant-wide systems
P. 270
244 Distributed Model Predictive Control for Plant-Wide Systems
Communicator
ˆ x
… …
MPC 1 MPC 2 Predictor MPC N EKF
u 1 u 2 u N
N
2
u →F 1 u →F 2 u →F N
1
F F F N
FT 1 2 CT
PI PI … PI … PI
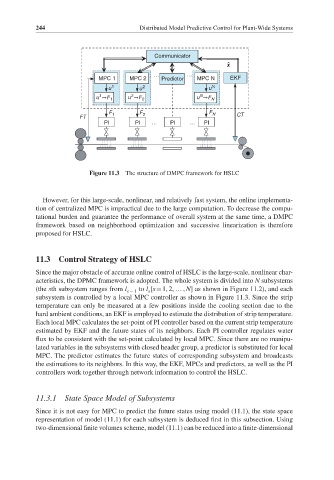
Figure 11.3 The structure of DMPC framework for HSLC
However, for this large-scale, nonlinear, and relatively fast system, the online implementa-
tion of centralized MPC is impractical due to the large computation. To decrease the compu-
tational burden and guarantee the performance of overall system at the same time, a DMPC
framework based on neighborhood optimization and successive linearization is therefore
proposed for HSLC.
11.3 Control Strategy of HSLC
Since the major obstacle of accurate online control of HSLC is the large-scale, nonlinear char-
acteristics, the DPMC framework is adopted. The whole system is divided into N subsystems
(the sth subsystem ranges from l s − 1 to l [s = 1, 2, … , N] as shown in Figure 11.2), and each
s
subsystem is controlled by a local MPC controller as shown in Figure 11.3. Since the strip
temperature can only be measured at a few positions inside the cooling section due to the
hard ambient conditions, an EKF is employed to estimate the distribution of strip temperature.
Each local MPC calculates the set-point of PI controller based on the current strip temperature
estimated by EKF and the future states of its neighbors. Each PI controller regulates water
flux to be consistent with the set-point calculated by local MPC. Since there are no manipu-
lated variables in the subsystems with closed header group, a predictor is substituted for local
MPC. The predictor estimates the future states of corresponding subsystem and broadcasts
the estimations to its neighbors. In this way, the EKF, MPCs and predictors, as well as the PI
controllers work together through network information to control the HSLC.
11.3.1 State Space Model of Subsystems
Since it is not easy for MPC to predict the future states using model (11.1), the state space
representation of model (11.1) for each subsystem is deduced first in this subsection. Using
two-dimensional finite volumes scheme, model (11.1) can be reduced into a finite-dimensional