
Page 303 - Distributed model predictive control for plant-wide systems
P. 303
High-Speed Train Control with Distributed Predictive Control 277
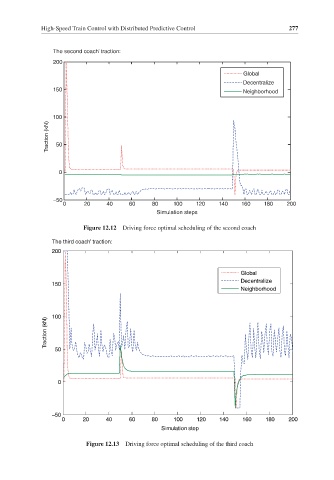
The second coach’ traction:
200
Global
Decentralize
150
Neighborhood
100
Traction (kN) 50
0
−50
0 20 40 60 80 100 120 140 160 180 200
Simulation steps
Figure 12.12 Driving force optimal scheduling of the second coach
The third coach’ traction:
200
Global
Decentralize
150
Neighborhood
100
Traction (kN)
50
0
−50
0 20 40 60 80 100 120 140 160 180 200
Simulation step
Figure 12.13 Driving force optimal scheduling of the third coach