
Page 445 - Dynamics of Mechanical Systems
P. 445
0593_C12_fm Page 426 Monday, May 6, 2002 3:11 PM
426 Dynamics of Mechanical Systems
In Section 11.12, we found the kinetic energy K of the pendulum to be (see Eq. (11.12.10)):
K = ( ) ml θ 2 (12.3.13)
2 ˙
16
As with the simple pendulum, the only forces doing work on the rod pendulum are
gravitational forces. In Section 11.11, we found (see Eq. (11.11.5)) that the potential energy
P of the gravitation forces on the rod may be expressed as:
P = mgh (12.3.14)
where here h is the elevation of the rod mass center G above an arbitrary but fixed reference
level. If, as before, we take the reference level through the support O, we find h to be:
h =−( ) 2 cosθ (12.3.15)
l
The Lagrangian L of the rod pendulum is then
−
L = K P = ( ) ml θ 2 +( mg ) 2 cosθ (12.3.16)
2 ˙
l
16
Substituting L into Lagrange’s equations, Eq. (12.3.5), thus produces the expression:
( 13)ml θ +(mgl 2)sinθ = 0 (12.3.17)
2 ˙˙
or
˙˙
θ +(3g 2l ) sinθ = 0 (12.3.18)
Equation (12.3.18) is identical to Eqs. (8.9.10) and (12.2.14) obtained using d’Alembert’s
principle and Kane’s equations.
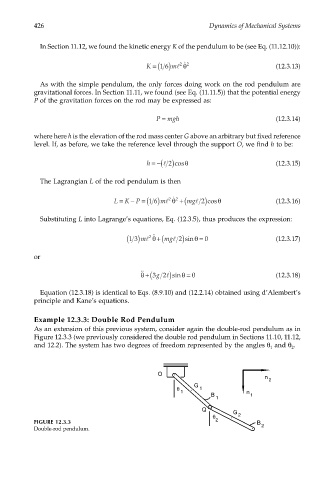
Example 12.3.3: Double Rod Pendulum
As an extension of this previous system, consider again the double-rod pendulum as in
Figure 12.3.3 (we previously considered the double rod pendulum in Sections 11.10, 11.12,
and 12.2). The system has two degrees of freedom represented by the angles θ and θ .
2
1
O
n
2
θ G 1
1 n
B 1
1
Q G
θ 2
FIGURE 12.3.3 2 B 2
Double-rod pendulum.