
Page 600 - Dynamics of Mechanical Systems
P. 600
0593_C17_fm Page 581 Tuesday, May 7, 2002 7:12 AM
Mechanical Components: Gears 581
Then, the polar angle θ is:
−1
θ = tan yx
+
= tan −1 cos ββsin β (17.4.17)
−
sin ββcos β
Finally, from Figure 17.4.5, the angle φ is related to β by the relation:
+
tanφ = r β r = β = φ θ (17.4.18)
b b c
Then, θ is:
c
D
θ = (tan φ) − φ = Inv φ (17.4.19)
c
where Invφ is commonly called the involute function.
17.5 Spur Gear Nomenclature
As noted earlier, we will focus our attention upon parallel shaft gears and specifically
upon spur gears. In this section, we will introduce and define the notation and nomen-
clature commonly used with spur gears. In the next section, we will consider the kine-
matics of these gears.
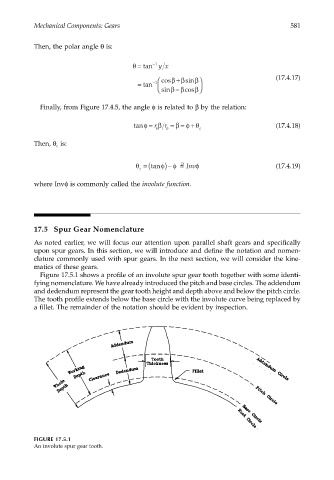
Figure 17.5.1 shows a profile of an involute spur gear tooth together with some identi-
fying nomenclature. We have already introduced the pitch and base circles. The addendum
and dedendum represent the gear tooth height and depth above and below the pitch circle.
The tooth profile extends below the base circle with the involute curve being replaced by
a fillet. The remainder of the notation should be evident by inspection.
FIGURE 17.5.1
An involute spur gear tooth.