
Page 229 - Electric Drives and Electromechanical Systems
P. 229
Chapter 8 Stepper motors 225
Hybrid stepper motors have a bipolar-current requirement, whereas variable
reluctance stepper motors require a unipolar drive. In a unipolar drive, the output of
the translator is directly used to switch the individual phase currents; the power devices
are normally MOSFETs. Since the winding current’s decay time has an adverse effect
stepper-motor performance, it is common practice to add a zener diode or a resistor to
the flywheel path which ensures that the current decays at an increased rate, (see
Fig. 8.11). Bidirectional winding currents can be controlled by using an H-bridge,
identical to that used in d.c. brushed motors. With this configuration, the free-wheeling
current decays more rapidly, because of the opposition of the supply voltage, so it is not
necessary to add a resistance or zener diodes to the flywheel path. A different approach
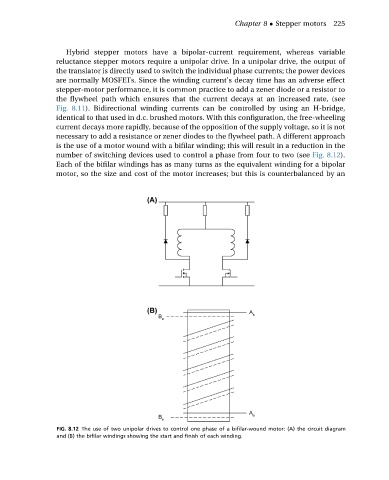
is the use of a motor wound with a bifilar winding; this will result in a reduction in the
number of switching devices used to control a phase from four to two (see Fig. 8.12).
Each of the bifilar windings has as many turns as the equivalent winding for a bipolar
motor, so the size and cost of the motor increases; but this is counterbalanced by an
FIG. 8.12 The use of two unipolar drives to control one phase of a bifilar-wound motor: (A) the circuit diagram
and (B) the bifilar windings showing the start and finish of each winding.