
Page 51 - Finite Element Analysis with ANSYS Workbench
P. 51
42 Chapter 3 Beam Analysis
3.1 Basic Equations
3.1.1 Differential Equation
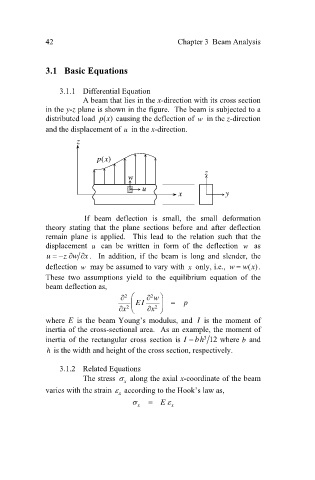
A beam that lies in the x-direction with its cross section
in the y-z plane is shown in the figure. The beam is subjected to a
distributed load ()px causing the deflection of w in the z-direction
and the displacement of u in the x-direction.
z
x
p ()
z
w
u
x y
If beam deflection is small, the small deformation
theory stating that the plane sections before and after deflection
remain plane is applied. This lead to the relation such that the
displacement u can be written in form of the deflection w as
u z w x . In addition, if the beam is long and slender, the
deflection w may be assumed to vary with x only, i.e., w w ().
x
These two assumptions yield to the equilibrium equation of the
beam deflection as,
2 EI 2 w p
x 2 x 2
where E is the beam Young’s modulus, and I is the moment of
inertia of the cross-sectional area. As an example, the moment of
inertia of the rectangular cross section is I bh 3 12 where b and
h is the width and height of the cross section, respectively.
3.1.2 Related Equations
The stress along the axial x-coordinate of the beam
x
varies with the strain according to the Hook’s law as,
x
x E
x