
Page 151 - Flexible Robotics in Medicine
P. 151
Modular origami joint operator to create bendable motions with multiple radii 137
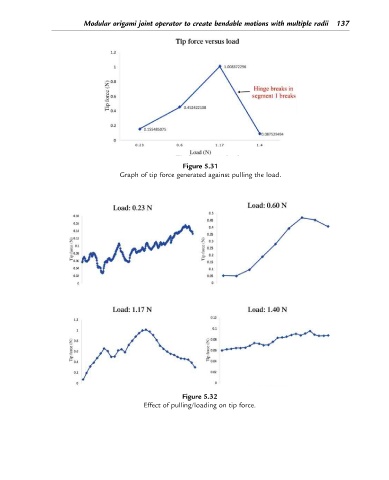
Figure 5.31
Graph of tip force generated against pulling the load.
Figure 5.32
Effect of pulling/loading on tip force.