
Page 147 - Flexible Robotics in Medicine
P. 147
Modular origami joint operator to create bendable motions with multiple radii 133
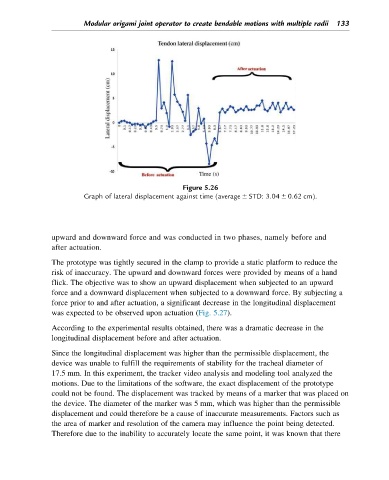
Figure 5.26
Graph of lateral displacement against time (average 6 STD: 3.04 6 0.62 cm).
upward and downward force and was conducted in two phases, namely before and
after actuation.
The prototype was tightly secured in the clamp to provide a static platform to reduce the
risk of inaccuracy. The upward and downward forces were provided by means of a hand
flick. The objective was to show an upward displacement when subjected to an upward
force and a downward displacement when subjected to a downward force. By subjecting a
force prior to and after actuation, a significant decrease in the longitudinal displacement
was expected to be observed upon actuation (Fig. 5.27).
According to the experimental results obtained, there was a dramatic decrease in the
longitudinal displacement before and after actuation.
Since the longitudinal displacement was higher than the permissible displacement, the
device was unable to fulfill the requirements of stability for the tracheal diameter of
17.5 mm. In this experiment, the tracker video analysis and modeling tool analyzed the
motions. Due to the limitations of the software, the exact displacement of the prototype
could not be found. The displacement was tracked by means of a marker that was placed on
the device. The diameter of the marker was 5 mm, which was higher than the permissible
displacement and could therefore be a cause of inaccurate measurements. Factors such as
the area of marker and resolution of the camera may influence the point being detected.
Therefore due to the inability to accurately locate the same point, it was known that there