
Page 143 - Flexible Robotics in Medicine
P. 143
Modular origami joint operator to create bendable motions with multiple radii 129
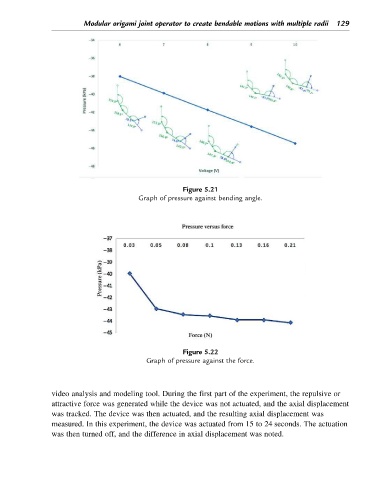
Figure 5.21
Graph of pressure against bending angle.
Figure 5.22
Graph of pressure against the force.
video analysis and modeling tool. During the first part of the experiment, the repulsive or
attractive force was generated while the device was not actuated, and the axial displacement
was tracked. The device was then actuated, and the resulting axial displacement was
measured. In this experiment, the device was actuated from 15 to 24 seconds. The actuation
was then turned off, and the difference in axial displacement was noted.