
Page 145 - Flexible Robotics in Medicine
P. 145
Modular origami joint operator to create bendable motions with multiple radii 131
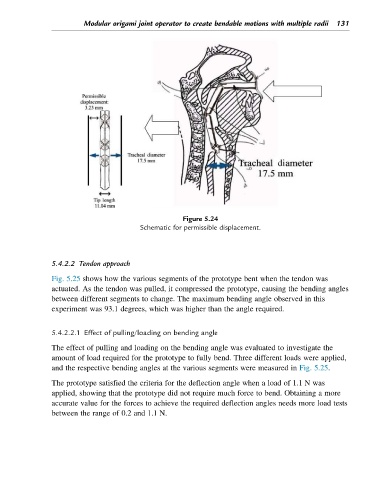
Figure 5.24
Schematic for permissible displacement.
5.4.2.2 Tendon approach
Fig. 5.25 shows how the various segments of the prototype bent when the tendon was
actuated. As the tendon was pulled, it compressed the prototype, causing the bending angles
between different segments to change. The maximum bending angle observed in this
experiment was 93.1 degrees, which was higher than the angle required.
5.4.2.2.1 Effect of pulling/loading on bending angle
The effect of pulling and loading on the bending angle was evaluated to investigate the
amount of load required for the prototype to fully bend. Three different loads were applied,
and the respective bending angles at the various segments were measured in Fig. 5.25.
The prototype satisfied the criteria for the deflection angle when a load of 1.1 N was
applied, showing that the prototype did not require much force to bend. Obtaining a more
accurate value for the forces to achieve the required deflection angles needs more load tests
between the range of 0.2 and 1.1 N.