
Page 149 - Flexible Robotics in Medicine
P. 149
Modular origami joint operator to create bendable motions with multiple radii 135
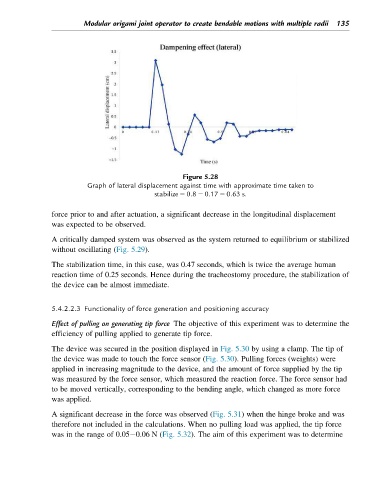
Figure 5.28
Graph of lateral displacement against time with approximate time taken to
stabilize 5 0.8 2 0.17 5 0.63 s.
force prior to and after actuation, a significant decrease in the longitudinal displacement
was expected to be observed.
A critically damped system was observed as the system returned to equilibrium or stabilized
without oscillating (Fig. 5.29).
The stabilization time, in this case, was 0.47 seconds, which is twice the average human
reaction time of 0.25 seconds. Hence during the tracheostomy procedure, the stabilization of
the device can be almost immediate.
5.4.2.2.3 Functionality of force generation and positioning accuracy
Effect of pulling on generating tip force The objective of this experiment was to determine the
efficiency of pulling applied to generate tip force.
The device was secured in the position displayed in Fig. 5.30 by using a clamp. The tip of
the device was made to touch the force sensor (Fig. 5.30). Pulling forces (weights) were
applied in increasing magnitude to the device, and the amount of force supplied by the tip
was measured by the force sensor, which measured the reaction force. The force sensor had
to be moved vertically, corresponding to the bending angle, which changed as more force
was applied.
A significant decrease in the force was observed (Fig. 5.31) when the hinge broke and was
therefore not included in the calculations. When no pulling load was applied, the tip force
was in the range of 0.05 0.06 N (Fig. 5.32). The aim of this experiment was to determine