
Page 141 - Flexible Robotics in Medicine
P. 141
Modular origami joint operator to create bendable motions with multiple radii 127
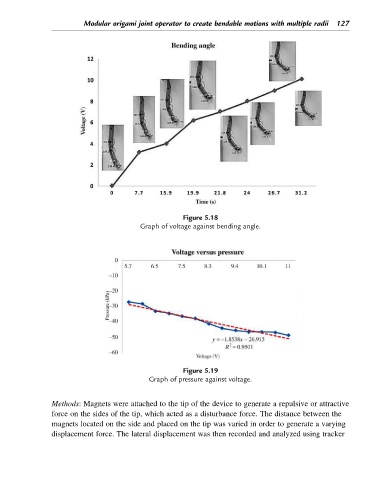
Figure 5.18
Graph of voltage against bending angle.
Figure 5.19
Graph of pressure against voltage.
Methods: Magnets were attached to the tip of the device to generate a repulsive or attractive
force on the sides of the tip, which acted as a disturbance force. The distance between the
magnets located on the side and placed on the tip was varied in order to generate a varying
displacement force. The lateral displacement was then recorded and analyzed using tracker