
Page 219 - Flexible Robotics in Medicine
P. 219
206 Chapter 8
Figure 8.10
Goldfinger retractor before and after tightening.
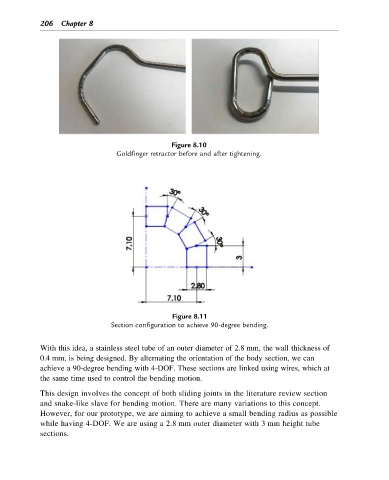
Figure 8.11
Section configuration to achieve 90-degree bending.
With this idea, a stainless steel tube of an outer diameter of 2.8 mm, the wall thickness of
0.4 mm, is being designed. By alternating the orientation of the body section, we can
achieve a 90-degree bending with 4-DOF. These sections are linked using wires, which at
the same time used to control the bending motion.
This design involves the concept of both sliding joints in the literature review section
and snake-like slave for bending motion. There are many variations to this concept.
However, for our prototype, we are aiming to achieve a small bending radius as possible
while having 4-DOF. We are using a 2.8 mm outer diameter with 3 mm height tube
sections.