
Page 292 - Flexible Robotics in Medicine
P. 292
282 Chapter 12
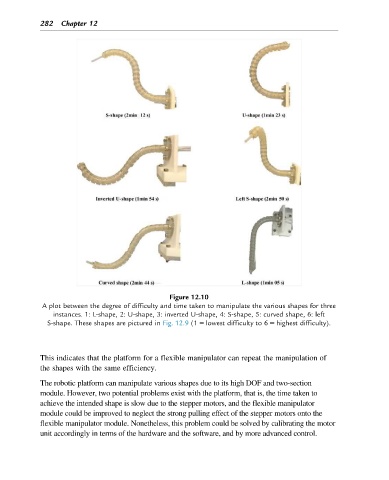
Figure 12.10
A plot between the degree of difficulty and time taken to manipulate the various shapes for three
instances. 1: L-shape, 2: U-shape, 3: inverted U-shape, 4: S-shape, 5: curved shape, 6: left
S-shape. These shapes are pictured in Fig. 12.9 (1 5 lowest difficulty to 6 5 highest difficulty).
This indicates that the platform for a flexible manipulator can repeat the manipulation of
the shapes with the same efficiency.
The robotic platform can manipulate various shapes due to its high DOF and two-section
module. However, two potential problems exist with the platform, that is, the time taken to
achieve the intended shape is slow due to the stepper motors, and the flexible manipulator
module could be improved to neglect the strong pulling effect of the stepper motors onto the
flexible manipulator module. Nonetheless, this problem could be solved by calibrating the motor
unit accordingly in terms of the hardware and the software, and by more advanced control.