
Page 137 - Fundamentals of Ocean Renewable Energy Generating Electricity From The Sea
P. 137
128 Fundamentals of Ocean Renewable Energy
5.4.2 Comparison Between WEC Technologies
Issues associated with WECs are survivability (because they will generally be
sited in locations where the wave climate is, by its very nature, extreme), and
the cost associated with designing the devices to survive such conditions. As an
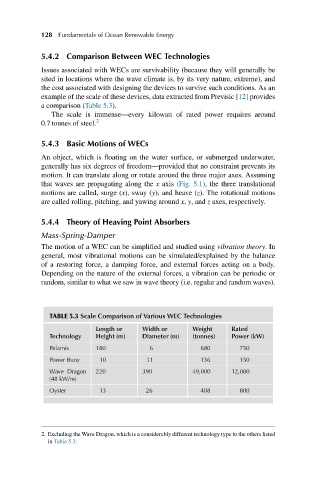
example of the scale of these devices, data extracted from Previsic [12] provides
a comparison (Table 5.3).
The scale is immense—every kilowatt of rated power requires around
0.7 tonnes of steel. 2
5.4.3 Basic Motions of WECs
An object, which is floating on the water surface, or submerged underwater,
generally has six degrees of freedom—provided that no constraint prevents its
motion. It can translate along or rotate around the three major axes. Assuming
that waves are propagating along the x axis (Fig. 5.1), the three translational
motions are called, surge (x), sway (y), and heave (z). The rotational motions
are called rolling, pitching, and yawing around x, y, and z axes, respectively.
5.4.4 Theory of Heaving Point Absorbers
Mass-Spring-Damper
The motion of a WEC can be simplified and studied using vibration theory.In
general, most vibrational motions can be simulated/explained by the balance
of a restoring force, a damping force, and external forces acting on a body.
Depending on the nature of the external forces, a vibration can be periodic or
random, similar to what we saw in wave theory (i.e. regular and random waves).
TABLE 5.3 Scale Comparison of Various WEC Technologies
Length or Width or Weight Rated
Technology Height (m) Diameter (m) (tonnes) Power (kW)
Pelamis 180 6 680 750
Power Buoy 10 11 136 150
Wave Dragon 220 390 49,000 12,000
(48 kW/m)
Oyster 13 26 408 800
2. Excluding the Wave Dragon, which is a considerably different technology type to the others listed
in Table 5.3.