
Page 143 - Human Inspired Dexterity in Robotic Manipulation
P. 143
140 Human Inspired Dexterity in Robotic Manipulation
(A-1) (A-2)
(C)
(B)
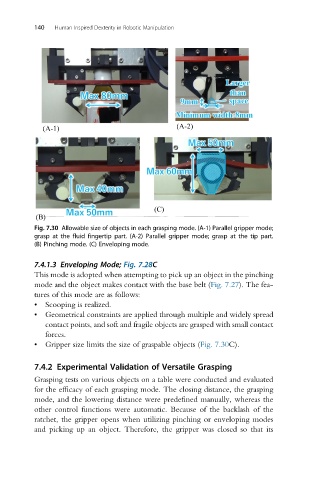
Fig. 7.30 Allowable size of objects in each grasping mode. (A-1) Parallel gripper mode;
grasp at the fluid fingertip part. (A-2) Parallel gripper mode; grasp at the tip part.
(B) Pinching mode. (C) Enveloping mode.
7.4.1.3 Enveloping Mode; Fig. 7.28C
This mode is adopted when attempting to pick up an object in the pinching
mode and the object makes contact with the base belt (Fig. 7.27). The fea-
tures of this mode are as follows:
• Scooping is realized.
• Geometrical constraints are applied through multiple and widely spread
contact points, and soft and fragile objects are grasped with small contact
forces.
• Gripper size limits the size of graspable objects (Fig. 7.30C).
7.4.2 Experimental Validation of Versatile Grasping
Grasping tests on various objects on a table were conducted and evaluated
for the efficacy of each grasping mode. The closing distance, the grasping
mode, and the lowering distance were predefined manually, whereas the
other control functions were automatic. Because of the backlash of the
ratchet, the gripper opens when utilizing pinching or enveloping modes
and picking up an object. Therefore, the gripper was closed so that its