
Page 144 - Human Inspired Dexterity in Robotic Manipulation
P. 144
Hand Design—Hybrid Soft and Hard Structures 141
unnecessary opening does not happen, and the distance between the tips of
the gripper can remain constant. When grasping fragile objects such as tofu,
the closing distance was manually determined based on the previously men-
tioned method. The objects were randomly placed on the table manually,
such that the center of the objects was around the depicted circle with a
5 mm radius. Thus, the object position had cumulative deviation resulting
from manual placement and the radius of the circle.
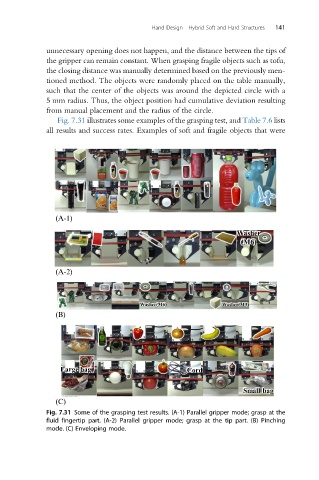
Fig. 7.31 illustrates some examples of the grasping test, and Table 7.6 lists
all results and success rates. Examples of soft and fragile objects that were
(A-1)
(A-2)
(B)
(C)
Fig. 7.31 Some of the grasping test results. (A-1) Parallel gripper mode; grasp at the
fluid fingertip part. (A-2) Parallel gripper mode; grasp at the tip part. (B) Pinching
mode. (C) Enveloping mode.