
Page 255 - Introduction to Autonomous Mobile Robots
P. 255
Chapter 5
240
measurement points contributing to each line as developed for line extraction in section
4.3.1.1:
σ σ
Σ Rj = αα αr (5.62)
,
σ σ
rα
rr
j
a) b)
line j
α j
r
j
c) r
line j
r j
-π α j 0 π
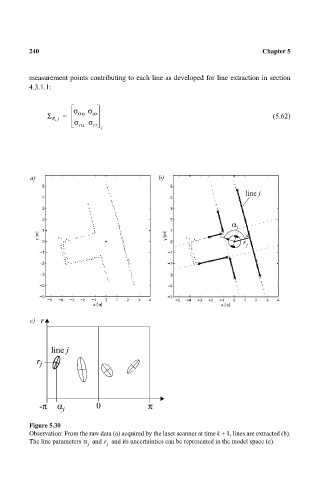
Figure 5.30
Observation: From the raw data (a) acquired by the laser scanner at time k + 1, lines are extracted (b).
The line parameters α j and and its uncertainties can be represented in the model space (c).
r
j