
Page 333 - Matrix Analysis & Applied Linear Algebra
P. 333
5.6 Unitary and Orthogonal Matrices 329
z z
v
π/4
π/2
y y
x View (a) v x View (b)
z
z
π/3
y
v y
x x
v
View (c) View (d)
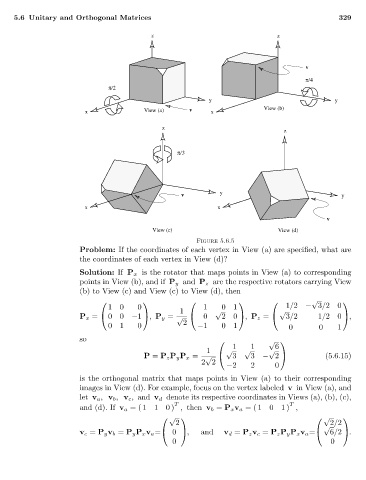
Figure 5.6.5
Problem: If the coordinates of each vertex in View (a) are specified, what are
the coordinates of each vertex in View (d)?
Solution: If P x is the rotator that maps points in View (a) to corresponding
points in View (b), and if P y and P z are the respective rotators carrying View
(b) to View (c) and View (c) to View (d), then
√
10 0 1 1 √ 0 1 √ 1/2 − 3/2 0
P x = 00 −1 , P y = √ 0 20 , P z = 3/2 1/2 0 ,
2
01 0 −1 0 1 0 0 1
so
√
1 1 6
1 √ √ √
P = P z P y P x = √ 3 3 − 2 (5.6.15)
2 2
−2 2 0
is the orthogonal matrix that maps points in View (a) to their corresponding
images in View (d). For example, focus on the vertex labeled v in View (a), and
let v a , v b , v c , and v d denote its respective coordinates in Views (a), (b), (c),
T T
and (d). If v a =( 110 ) , then v b = P x v a =( 101 ) ,
√
√
2 2/2
√
v c = P y v b = P y P x v a = 0 , and v d = P z v c = P z P y P x v a = 6/2 .
0 0