
Page 43 - Mechanical Engineer's Data Handbook
P. 43
32 MECHANICAL ENGINEER’S DATA HANDBOOK
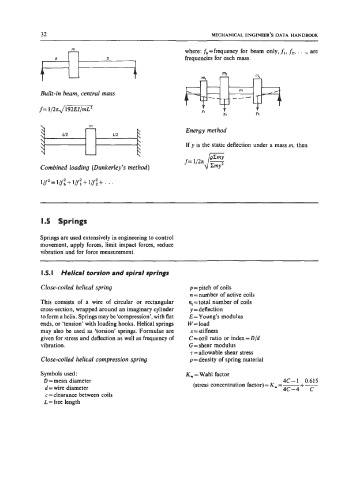
rn where: &=frequency for beam only, f,, f2, . . ., are
a b frequencies for each mass.
I
m2
3 rn3
m1
---
Built-in beam, central mass rn
f= 1/2nJEEi7iZ
Yl
Y2 Y3
Energy method
If y is the static deflection under a mass m, then
Combined loading (Dunkerley’s method)
l/y= + 1fl: + 11: + . . .
1/f:
1.5 Springs
Springs are used extensively in engineering to control
movement, apply forces, limit impact forces, reduce
vibration and for force measurement.
I .5. I Helical torsion and spiral springs
Close-coiled helical spring p=pitch of coils
n = number of active coils
This consists of a wire of circular or rectangular n,=total number of coils
cross-section, wrapped around an imaginary cylinder y = deflection
to form a helix. Springs may be ‘compression’, with flat E =Young’s modulus
ends, or ‘tension’ with loading hooks. Helical springs W=load
may also be used as ‘torsion’ springs. Formulae are s =stiffness
given for stress and deflection as well as frequency of C = coil ratio or index = D/d
vibration. G = shear modulus
7 =allowable shear stress
Close-coiled helical compression spring p =density of spring material
Symbols used: K, = Wahl factor
D = mean diameter 4C-1 0.615
+
4c-4 c
d = wire diameter (stress concentration factor) = K, = - -
c = clearance between coils
L = free length