
Page 79 - Mechanical Engineer's Data Handbook
P. 79
68 MECHANICAL ENGINEER’S DATA HANDBOOK
U
where: a=-
R
Load rising and coming to rest, no drive
T,- la =mR(d -9)
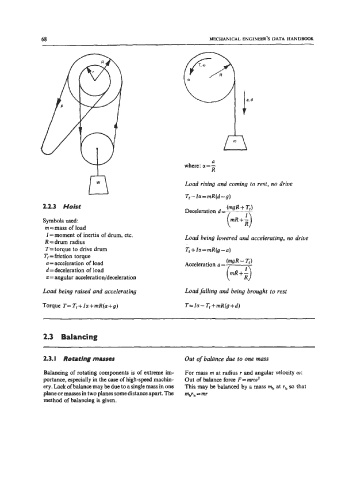
2.2.3 Hoist (WR+ T,)
Deceleration d =
Symbols used: (mR+i)
m-mass of load
I=moment of inertia of drum, etc. Load being lowered and accelerating, no drive
R=drum radius
T= torque to drive drum T, + la = mR(g -a)
T, =friction torque
a =acceleration of load
d = deceleration of load
a = angular acceleration/deceleration
Load being raised and accelerating Load falling and being brought to rest
Torque T= T, + Ia + mR(a + g) T=Ia- T, +mR(g +d)
2.3 Balancing
2.3. I Rotating masses Out of balance due to one mass
Balancing of rotating components is of extreme im- For mass m at radius r and angular velocity o:
portance, especially in the case of high-speed machin- Out of balance force F = mrd
ery. Lack of balance may be due to a single mass in one This may be balanced by a mass mb at ib SO that
plane or masses in two planes some distance apart. The mbrb= mr
method of balancing is given.