
Page 324 - Mechanical Engineers' Handbook (Volume 2)
P. 324
4 Standard Forms for Linear Models 315
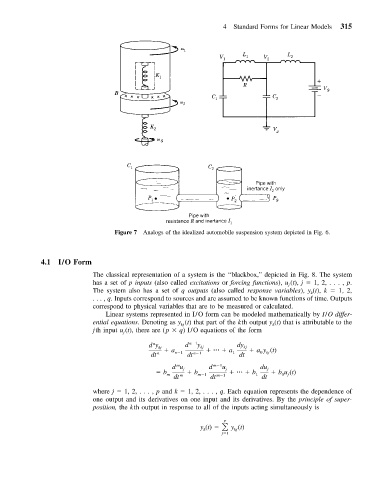
Figure 7 Analogs of the idealized automobile suspension system depicted in Fig. 6.
4.1 I/O Form
The classical representation of a system is the ‘‘blackbox,’’ depicted in Fig. 8. The system
has a set of p inputs (also called excitations or forcing functions), u (t), j 1, 2,..., p.
j
The system also has a set of q outputs (also called response variables), y (t), k 1, 2,
k
..., q. Inputs correspond to sources and are assumed to be known functions of time. Outputs
correspond to physical variables that are to be measured or calculated.
Linear systems represented in I/O form can be modeled mathematically by I/O differ-
ential equations. Denoting as y (t) that part of the kth output y (t) that is attributable to the
kj
k
jth input u (t), there are (p q) I/O equations of the form
j
n d n 1 y dy
dy kj kj kj
a a ay (t)
dt n n 1 dt n 1 1 dt 0 kj
m
du j d m 1 u j du j
b m b m 1 b 1 bu (t)
0 j
dt m dt m 1 dt
where j 1, 2,..., p and k 1, 2,..., q. Each equation represents the dependence of
one output and its derivatives on one input and its derivatives. By the principle of super-
position, the kth output in response to all of the inputs acting simultaneously is
y (t) y (t)
p
k
j 1 kj