
Page 558 - Mechanical Engineers' Handbook (Volume 2)
P. 558
3 Direct-Current Servomotors 549
Figure 4 (Continued)(c) Moving coil. (From Ref. 5.)
Mathematical Model of a Permanent-Magnet Servomotor
Comprehensive presentations on mathematical modeling of dc servomotors are given in Refs.
6–9. A simplified dynamic model is presented here.
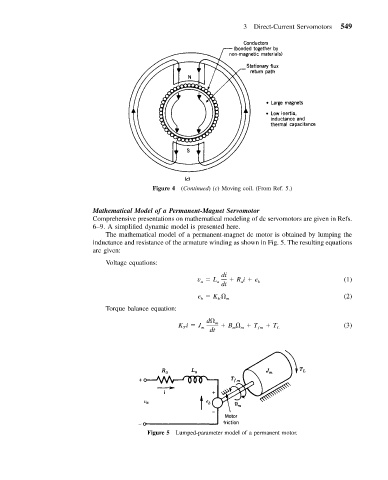
The mathematical model of a permanent-magnet dc motor is obtained by lumping the
inductance and resistance of the armature winding as shown in Fig. 5. The resulting equations
are given:
Voltage equations:
di
v L a Ri e b (1)
a
a
dt
e K m (2)
E
b
Torque balance equation:
d
Ki J m m B T ƒm T L (3)
m
m
T
dt
Figure 5 Lumped-parameter model of a permanent motor.