
Page 585 - Mechanical Engineers' Handbook (Volume 2)
P. 585
576 Servoactuators for Closed-Loop Control
1. AS THIS VANE IS
MOVING OUT OF ITS SLOT
PIN
CLIP
2. THIS VANE IS BEING FORCED
IN
3. ROCKER ARM BEARS UNDER
VANES TO HOLD THEM
AGAINST RING SURFACE
ROCKER ARM
PRESSURE PLATE
BEARING
SEAL
VANE
BEARING
ROTOR
COVER
SHAFT
RING BODY
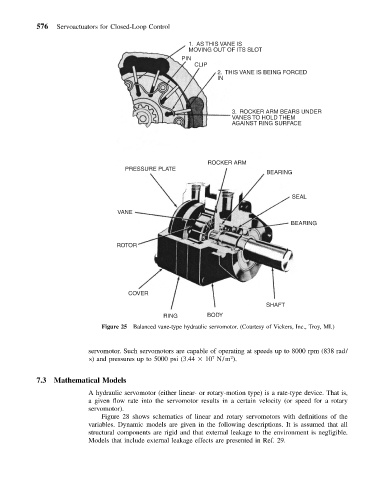
Figure 25 Balanced vane-type hydraulic servomotor. (Courtesy of Vickers, Inc., Troy, MI.)
servomotor. Such servomotors are capable of operating at speeds up to 8000 rpm (838 rad/
2
s) and pressures up to 5000 psi (3.44 10 N/m ).
7
7.3 Mathematical Models
A hydraulic servomotor (either linear- or rotary-motion type) is a rate-type device. That is,
a given flow rate into the servomotor results in a certain velocity (or speed for a rotary
servomotor).
Figure 28 shows schematics of linear and rotary servomotors with definitions of the
variables. Dynamic models are given in the following descriptions. It is assumed that all
structural components are rigid and that external leakage to the environment is negligible.
Models that include external leakage effects are presented in Ref. 29.