
Page 583 - Mechanical Engineers' Handbook (Volume 2)
P. 583
574 Servoactuators for Closed-Loop Control
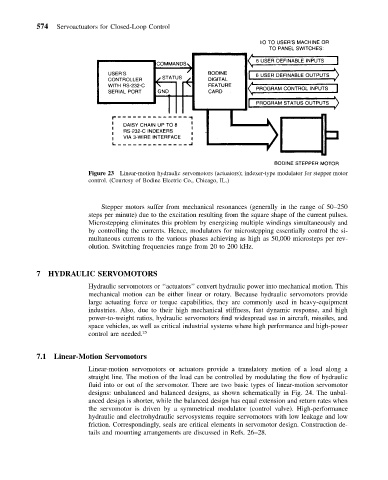
Figure 23 Linear-motion hydraulic servomotors (actuators); indexer-type modulator for stepper motor
control. (Courtesy of Bodine Electric Co., Chicago, IL.)
Stepper motors suffer from mechanical resonances (generally in the range of 50–250
steps per minute) due to the excitation resulting from the square shape of the current pulses.
Microstepping eliminates this problem by energizing multiple windings simultaneously and
by controlling the currents. Hence, modulators for microstepping essentially control the si-
multaneous currents to the various phases achieving as high as 50,000 microsteps per rev-
olution. Switching frequencies range from 20 to 200 kHz.
7 HYDRAULIC SERVOMOTORS
Hydraulic servomotors or ‘‘actuators’’ convert hydraulic power into mechanical motion. This
mechanical motion can be either linear or rotary. Because hydraulic servomotors provide
large actuating force or torque capabilities, they are commonly used in heavy-equipment
industries. Also, due to their high mechanical stiffness, fast dynamic response, and high
power-to-weight ratios, hydraulic servomotors find widespread use in aircraft, missiles, and
space vehicles, as well as critical industrial systems where high performance and high-power
control are needed. 25
7.1 Linear-Motion Servomotors
Linear-motion servomotors or actuators provide a translatory motion of a load along a
straight line. The motion of the load can be controlled by modulating the flow of hydraulic
fluid into or out of the servomotor. There are two basic types of linear-motion servomotor
designs: unbalanced and balanced designs, as shown schematically in Fig. 24. The unbal-
anced design is shorter, while the balanced design has equal extension and return rates when
the servomotor is driven by a symmetrical modulator (control valve). High-performance
hydraulic and electrohydraulic servosystems require servomotors with low leakage and low
friction. Correspondingly, seals are critical elements in servomotor design. Construction de-
tails and mounting arrangements are discussed in Refs. 26–28.