
Page 721 - Mechanical Engineers' Handbook (Volume 2)
P. 721
712 General-Purpose Control Devices
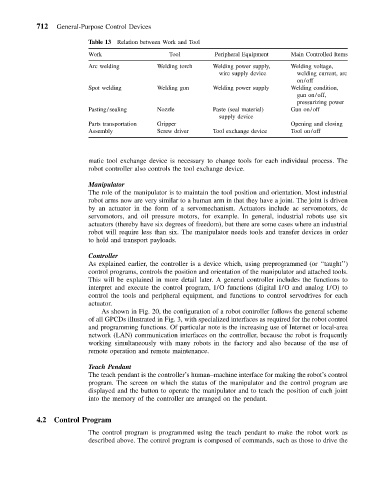
Table 13 Relation between Work and Tool
Work Tool Peripheral Equipment Main Controlled Items
Arc welding Welding torch Welding power supply, Welding voltage,
wire supply device welding current, arc
on/off
Spot welding Welding gun Welding power supply Welding condition,
gun on/off,
pressurizing power
Pasting/sealing Nozzle Paste (seal material) Gun on/off
supply device
Parts transportation Gripper Opening and closing
Assembly Screw driver Tool exchange device Tool on/off
matic tool exchange device is necessary to change tools for each individual process. The
robot controller also controls the tool exchange device.
Manipulator
The role of the manipulator is to maintain the tool position and orientation. Most industrial
robot arms now are very similar to a human arm in that they have a joint. The joint is driven
by an actuator in the form of a servomechanism. Actuators include ac servomotors, dc
servomotors, and oil pressure motors, for example. In general, industrial robots use six
actuators (thereby have six degrees of freedom), but there are some cases where an industrial
robot will require less than six. The manipulator needs tools and transfer devices in order
to hold and transport payloads.
Controller
As explained earlier, the controller is a device which, using preprogrammed (or ‘‘taught’’)
control programs, controls the position and orientation of the manipulator and attached tools.
This will be explained in more detail later. A general controller includes the functions to
interpret and execute the control program, I/O functions (digital I/O and analog I/O) to
control the tools and peripheral equipment, and functions to control servodrives for each
actuator.
As shown in Fig. 20, the configuration of a robot controller follows the general scheme
of all GPCDs illustrated in Fig. 3, with specialized interfaces as required for the robot control
and programming functions. Of particular note is the increasing use of Internet or local-area
network (LAN) communication interfaces on the controller, because the robot is frequently
working simultaneously with many robots in the factory and also because of the use of
remote operation and remote maintenance.
Teach Pendant
The teach pendant is the controller’s human–machine interface for making the robot’s control
program. The screen on which the status of the manipulator and the control program are
displayed and the button to operate the manipulator and to teach the position of each joint
into the memory of the controller are arranged on the pendant.
4.2 Control Program
The control program is programmed using the teach pendant to make the robot work as
described above. The control program is composed of commands, such as those to drive the