
Page 724 - Mechanical Engineers' Handbook (Volume 2)
P. 724
4 Robot Controllers 715
Table 15 Robot Program with Peripheral Equipment
Control
Step commands
01: MOVE P1
02: MOVE P2
03: MOVE P3
04: OUT ANALOG PORT 0 VALUE some value
05: OUTANALOGPORT 1VALUE some value
06: OUT DIGITAL PORT 0 VALUE ON
07: MOVE LINEAR P4 SPEED 600mm/sec
08: OUT DIGITAL PORT 0 VALUE OFF
09: MOVE P5
10: MOVE P6
Acknowledgments
The authors gratefully acknowledge the contributions of Steven Tourangeau of Rockwell Automation to
Section 3 as well as the contributions to the previous edition of this chapter by the late Odo J. Struger
of Rockwell Automation.
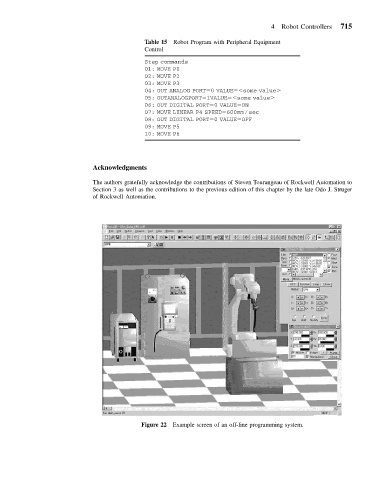
Figure 22 Example screen of an off-line programming system.