
Page 96 - Mechatronic Systems Modelling and Simulation with HDLs
P. 96
5.3 CO-SIMULATION BY SOFTWARE INTERPRETATION 85
main(argc,argv)
int argc;
char argv[]; Mem PIO
{
int i, j, stat;
double v1, v2;
...
while (true) {
v1 = mem[pio];
if (v1 > THRESH) {
if (!check(v1))
continue;
stat = getstat();
if (stat == 0) CPU
putstat(HARD);
...
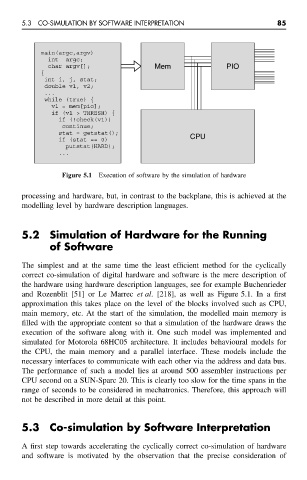
Figure 5.1 Execution of software by the simulation of hardware
processing and hardware, but, in contrast to the backplane, this is achieved at the
modelling level by hardware description languages.
5.2 Simulation of Hardware for the Running
of Software
The simplest and at the same time the least efficient method for the cyclically
correct co-simulation of digital hardware and software is the mere description of
the hardware using hardware description languages, see for example Buchenrieder
and Rozenblit [51] or Le Marrec et al. [218], as well as Figure 5.1. In a first
approximation this takes place on the level of the blocks involved such as CPU,
main memory, etc. At the start of the simulation, the modelled main memory is
filled with the appropriate content so that a simulation of the hardware draws the
execution of the software along with it. One such model was implemented and
simulated for Motorola 68HC05 architecture. It includes behavioural models for
the CPU, the main memory and a parallel interface. These models include the
necessary interfaces to communicate with each other via the address and data bus.
The performance of such a model lies at around 500 assembler instructions per
CPU second on a SUN-Sparc 20. This is clearly too slow for the time spans in the
range of seconds to be considered in mechatronics. Therefore, this approach will
not be described in more detail at this point.
5.3 Co-simulation by Software Interpretation
A first step towards accelerating the cyclically correct co-simulation of hardware
and software is motivated by the observation that the precise consideration of