
Page 146 - Mechatronics for Safety, Security and Dependability in a New Era
P. 146
Ch27-I044963.fm Page 130 Monday, August 7, 2006 11:26 AM
Ch27-I044963.fm
130
130 Page 130 Monday, August 7,2006 11:26 AM
This paper describes a method of reducing the number of the tests, in which k-nearest-neighbor rule is
used instead of the heuristics. In this method the k-nearest-neighbor rule extracts some parts and/or
subassemblies whose possibilities of being removed without any interference are strong, and then the
tests for only them are performed by using CAD data.
3 r1
1 r6
: Part t
1 2 5 5:Par
2 4 r2 r3 r5 r7 r8 —: : Connective relation
Connective relation
6 3 4
between parts
6 5 r4 between parts
Part-connectivity graph
Part-connectivity graph
rule
K-nearest-neighbor
3 K-nearest-neighbor rule
_L
Labeled samples
T r1 Labeled samples
ri(i=1,2,…): Connective relation
}_
r6 r6 r2 ri(i=1,2,…): Connective relation
r8 r8 r5 r5 , : Heuristic precedence relation
: Heuristic precedence relation
r7 r7 r3 Generation of heuristic
Generation of heuristic
r r4 4
4 4 3 3 2 2 1 1 Level precedence graph
Level
precedence graph
3 J
cut set t 1 1 1 1 £ 7©- -© >
2
5
cut s e
{r1, r2} 1 1 2 4 Weight assignment and cut-set
{r1, r2>..V^Tv
Weight assignment and cut-set
6 3 3 4 generation
1 |V®-^-© generation
{r2, r4}
{r2, r4}
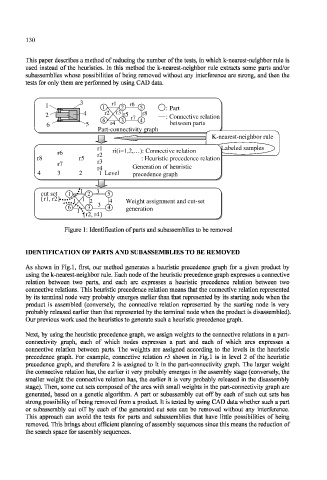
Figure 1: Identification of parts and subassemblies to be removed
IDENTIFICATION OF PARTS AND SUBASSEMBLIES TO BE REMOVED
As shown in Fig.l, first, our method generates a heuristic precedence graph for a given product by
using the k-nearest-neighbor rule. Each node of the heuristic precedence graph expresses a connective
relation between two parts, and each arc expresses a heuristic precedence relation between two
connective relations. This heuristic precedence relation means that the connective relation represented
by its terminal node very probably emerges earlier than that represented by its starting node when the
product is assembled (conversely, the connective relation represented by the starting node is very
probably released earlier than that represented by the terminal node when the product is disassembled).
Our previous work used the heuristics to generate such a heuristic precedence graph.
Next, by using the heuristic precedence graph, we assign weights to the connective relations in a part-
connectivity graph, each of which nodes expresses a part and each of which arcs expresses a
connective relation between parts. The weights are assigned according to the levels in the heuristic
precedence graph. For example, connective relation r5 shown in Fig. 1 is in level 2 of the heuristic
precedence graph, and therefore 2 is assigned to it in the part-connectivity graph. The larger weight
the connective relation has, the earlier it very probably emerges in the assembly stage (conversely, the
smaller weight the connective relation has, the earlier it is very probably released in the disassembly
stage). Then, some cut sets composed of the arcs with small weights in the part-connectivity graph are
generated, based on a genetic algorithm. A part or subassembly cut off by each of such cut sets has
strong possibility of being removed from a product. It is tested by using CAD data whether such a part
or subassembly cut off by each of the generated cut sets can be removed without any interference.
This approach can avoid the tests for parts and subassemblies that have little possibilities of being
removed. This brings about efficient planning of assembly sequences since this means the reduction of
the search space for assembly sequences.