
Page 25 - Microsensors, MEMS and Smart Devices - Gardner Varadhan and Awadelkarim
P. 25
EMERGENCE OF MICROMACHINES
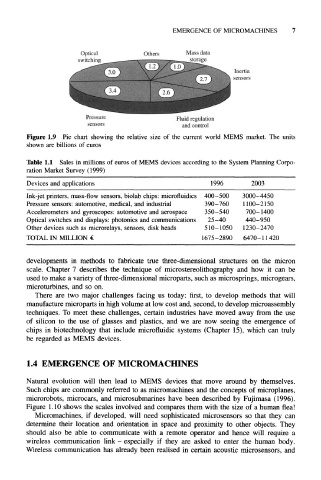
Figure 1.9 Pie chart showing the relative size of the current world MEMS market. The units
shown are billions of euros
Table 1.1 Sales in millions of euros of MEMS devices according to the System Planning Corpo-
ration Market Survey (1999)
Devices and applications 1996 2003
Ink-jet printers, mass-flow sensors, biolab chips: microfluidics 400-500 3000-4450
Pressure sensors: automotive, medical, and industrial 390-760 1100-2150
Accelerometers and gyroscopes: automotive and aerospace 350-540 700-1400
Optical switches and displays: photonics and communications 25-40 440-950
Other devices such as microrelays, sensors, disk heads 510-1050 1230-2470
TOTAL IN MILLION € 1675-2890 6470–11420
developments in methods to fabricate true three-dimensional structures on the micron
scale. Chapter 7 describes the technique of microstereolithography and how it can be
used to make a variety of three-dimensional microparts, such as microsprings, microgears,
microturbines, and so on.
There are two major challenges facing us today: first, to develop methods that will
manufacture microparts in high volume at low cost and, second, to develop microassembly
techniques. To meet these challenges, certain industries have moved away from the use
of silicon to the use of glasses and plastics, and we are now seeing the emergence of
chips in biotechnology that include microfluidic systems (Chapter 15), which can truly
be regarded as MEMS devices.
1.4 EMERGENCE OF MICROMACHINES
Natural evolution will then lead to MEMS devices that move around by themselves.
Such chips are commonly referred to as micromachines and the concepts of microplanes,
microrobots, microcars, and microsubmarines have been described by Fujimasa (1996).
Figure 1.10 shows the scales involved and compares them with the size of a human flea!
Micromachines, if developed, will need sophisticated microsensors so that they can
determine their location and orientation in space and proximity to other objects. They
should also be able to communicate with a remote operator and hence will require a
wireless communication link - especially if they are asked to enter the human body.
Wireless communication has already been realised in certain acoustic microsensors, and