
Page 26 - Microsensors, MEMS and Smart Devices - Gardner Varadhan and Awadelkarim
P. 26
INTRODUCTION
Dimension of object
-10 -9 -8 – 7 - 6 - 5 - 4 -3 -2 -1 0
A Urn mm cm m
H
IR Radio waves •
Visible
Ultrasound H
Nano- Sensors
Micromachines
k. k,
Inm 1mm 1m
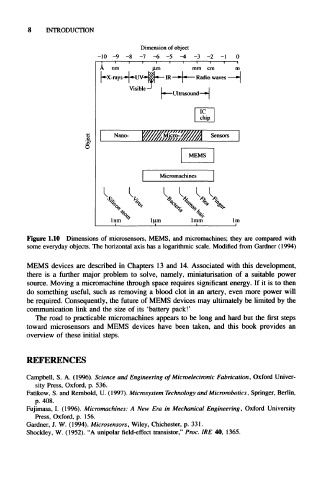
Figure 1.10 Dimensions of microsensors, MEMS, and micromachines; they are compared with
some everyday objects. The horizontal axis has a logarithmic scale. Modified from Gardner (1994)
MEMS devices are described in Chapters 13 and 14. Associated with this development,
there is a further major problem to solve, namely, miniaturisation of a suitable power
source. Moving a micromachine through space requires significant energy. If it is to then
do something useful, such as removing a blood clot in an artery, even more power will
be required. Consequently, the future of MEMS devices may ultimately be limited by the
communication link and the size of its 'battery pack!'
The road to practicable micromachines appears to be long and hard but the first steps
toward microsensors and MEMS devices have been taken, and this book provides an
overview of these initial steps.
REFERENCES
Campbell, S. A. (1996). Science and Engineering of Microelectronic Fabrication, Oxford Univer-
sity Press, Oxford, p. 536.
Fatikow, S. and Rembold, U. (1997). Microsystem Technology and Microrobotics, Springer, Berlin,
p. 408.
Fujimasa, I. (1996). Micromachines: A New Era in Mechanical Engineering, Oxford University
Press, Oxford, p. 156.
Gardner, J. W. (1994). Microsensors, Wiley, Chichester, p. 331.
Shockley, W. (1952). "A unipolar field-effect transistor," Proc. IRE 40, 1365.