
Page 212 - Modern Control Systems
P. 212
186 Chapter 3 State Variable Models
EXAMPLE 3.4 Inverted pendulum control
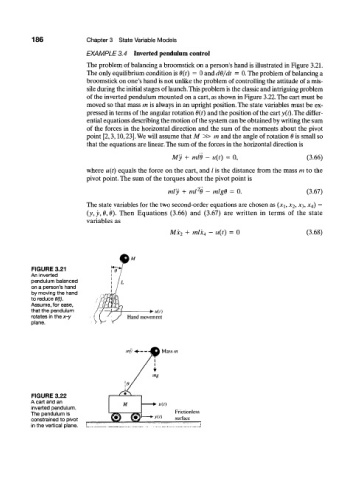
The problem of balancing a broomstick on a person's hand is illustrated in Figure 3.21.
The only equilibrium condition is 6(t) = 0 and dd/dt = 0. The problem of balancing a
broomstick on one's hand is not unlike the problem of controlling the attitude of a mis-
sile during the initial stages of launch. This problem is the classic and intriguing problem
of the inverted pendulum mounted on a cart, as shown in Figure 3.22. The cart must be
moved so that mass m is always in an upright position. The state variables must be ex-
pressed in terms of the angular rotation 6(t) and the position of the cart v(f). The differ-
ential equations describing the motion of the system can be obtained by writing the sum
of the forces in the horizontal direction and the sum of the moments about the pivot
point [2,3,10,23]. We will assume that M » m and the angle of rotation 6 is small so
that the equations are linear. The sum of the forces in the horizontal direction is
My + mid - u(t) = 0, (3.66)
where u(f) equals the force on the cart, and / is the distance from the mass m to the
pivot point. The sum of the torques about the pivot point is
2
mly + ml 6 - mlgd = 0. (3.67)
The state variables for the two second-order equations are chosen as (x\, x 2, x 3, x 4) =
(v, j>, 0, 6). Then Equations (3.66) and (3.67) are written in terms of the state
variables as
Mx 2 + mlx 4 - u(t) = 0 (3.68)
FIGURE 3.21
An inverted
pendulum balanced
on a person's hand
by moving the hand
to reduce e(t).
Assume, for ease,
that the pendulum
rotates in the x-y Hand movement
plane.
Mass m
/ I
/ *
i*
/*•*
FIGURE 3.22
A cart and an M • u(t)
inverted pendulum.
The pendulum is y(t)
constrained to pivot 0 1 • surface
in the vertical plane. L, 1.1-1. _." i