
Page 313 - Modern Control Systems
P. 313
Problems 287
PROBLEMS
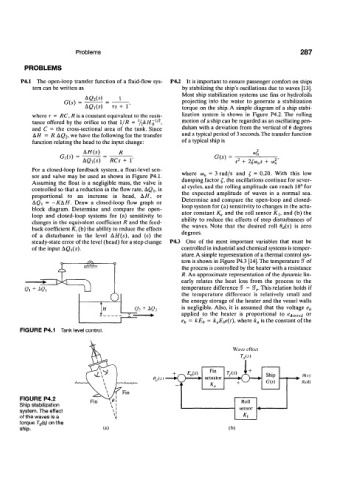
P4.1 The open-loop transfer function of a fluid-flow sys- P4.2 It is important to ensure passenger comfort on ships
tem can be written as by stabilizing the ship's oscillations due to waves [13].
Most ship stabilization systems use fins or hydrofoils
AQ 2 (*) = 1
G(s) = projecting into the water to generate a stabilization
AQi(s) TS + V torque on the ship. A simple diagram of a ship stabi-
where T = RC, Risa constant equivalent to the resis- lization system is shown in Figure P4.2. The rolling
1/2
tance offered by the orifice so that 1/R = '/2&.tfo ' motion of a ship can be regarded as an oscillating pen-
and C = the cross-sectional area of the tank. Since dulum with a deviation from the vertical of $ degrees
A / / = R AQ 2, we have the following for the transfer and a typical period of 3 seconds. The transfer function
function relating the head to the input change: of a typical ship is
M(s) R 7
Gi(s) = G(s)
A £>,(*) RCs + 1' S 2 + 2((1),,5 + (it),,
For a closed-loop feedback system, a float-level sen-
where &>„ = 3 rad/s and £ = 0.20. With this low
sor and valve may be used as shown in Figure P4.1.
damping factor £, the oscillations continue for sever-
Assuming the float is a negligible mass, the valve is
al cycles, and the rolling amplitude can reach 18° for
controlled so that a reduction in the flow rate, A(2i, is
the expected amplitude of waves in a normal sea.
proportional to an increase in head, AH, or
Determine and compare the open-loop and closed-
A(?i = -KAH. Draw a closed-loop flow graph or
block diagram. Determine and compare the open- loop system for (a) sensitivity to changes in the actu-
loop and closed-loop systems for (a) sensitivity to ator constant K„ and the roll sensor K\, and (b) the
ability to reduce the effects of step disturbances of
changes in the equivalent coefficient R and the feed-
the waves. Note that the desired roll d^s) is zero
back coefficient K, (b) the ability to reduce the effects
degrees.
of a disturbance in the level AH(s), and (c) the
steady-state error of the level (head) for a step change P4.3 One of the most important variables that must be
of the input A<2,(.s). controlled in industrial and chemical systems is temper-
ature. A simple representation of a thermal control sys-
tem is shown in Figure P4.3 [14].The temperature 2T of
d§b
the process is controlled by the heater with a resistance
R. An approximate representation of the dynamic lin-
early relates the heat loss from the process to the
0i + AG, ^ temperature difference 9i - ST e . This relation holds if
6 the energy storage difference is relatively vessel walls
temperature
small
and
the
the heater
and
of
the
H Q 2 + A0, is negligible. Also, it is assumed that the voltage e /(
applied to the heater is proportional to e^ired o r
•
= = k aE be(t), where is the constant of the
e h kE b k a
FIGURE P4.1 Tank level control.
Wave effect
+ E a(s)
ffjU) — K 3
FIGURE P4.2
Ship stabilization
system. The effect
of the waves is a
torque T d(s) on the
ship. (a) (b)