
Page 314 - Modern Control Systems
P. 314
288 Chapter 4 Feedback Control System Characteristics
Environment
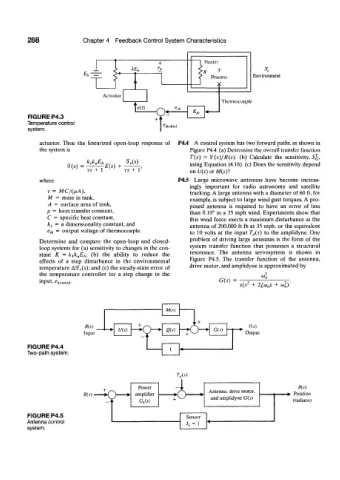
FIGURE P4.3
Temperature control
system. "desired
actuator. Then the linearized open-loop response of P4.4 A control system has two forward paths, as shown in
the system is Figure P4.4. (a) Determine the overall transfer function
7(5) = Y(s)/R(s). (b) Calculate the sensitivity, S£,
ST(s) = , E(s) + using Equation (4.16). (c) Does the sensitivity depend
TS + 1 TS + 1' on U(s) or M(*)?
where P4.5 Large microwave antennas have become increas-
ingly important for radio astronomy and satellite
T = MC/( PA), tracking. A large antenna with a diameter of 60 ft, for
M = mass in tank, example, is subject to large wind gust torques. A pro-
A = surface area of tank, posed antenna is required to have an error of less
p = heat transfer constant, than 0.10° in a 35 mph wind. Experiments show that
C = specific heat constant, this wind force exerts a maximum disturbance at the
k\ = a dimensionality constant, and antenna of 200,000 ft lb at 35 mph, or the equivalent
e tf, = output voltage of thermocouple. to 10 volts at the input T (i(s) to the amplidyne. One
problem of driving large antennas is the form of the
Determine and compare the open-loop and closed-
loop systems for (a) sensitivity to changes in the con- system transfer function that possesses a structural
resonance.
The
stant K = k\k aE b\ (b) the ability to reduce the Figure P4.5. The antenna servosystem is shown in
of
function
transfer
the
antenna,
effects of a step disturbance in the environmental drive motor, and amplidyne is approximated by
temperature A2T t .(i'); and (c) the steady-state error of
the temperature controller for a step change in the ,.?
input, e desired. G(s) = 2
s(.r + 2£w„s + (o „y
M(s)
R{s) + f~\ n.v)
U(s) Q(s)
Inpul + ^~ Output
FIGURE P4.4
Two-path system.
TM)
0(s)
Antenna, drive motor,
/?(.v) - • Position
and amplidyne G(s)
(radians)
FIGURE P4.5
Antenna control
system.