
Page 317 - Modern Control Systems
P. 317
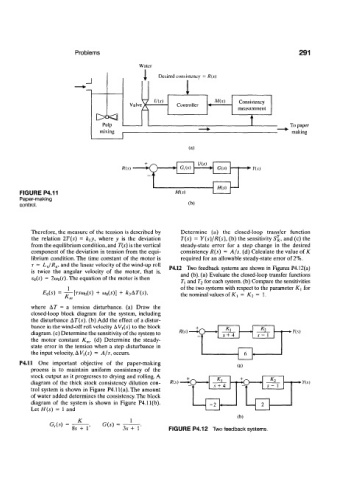
Problems 291
Water
Desired consistency = /?(.?)
Consistency
measurement
To paper
making
(a)
U(s)
Ris) > 0 G t(s) G(.v) • • Y(s)
H{s)
FIGURE P4.11 M(s)
Paper-making
control. (b)
Therefore, the measure of the tension is described by Determine (a) the closed-loop transfer function
the relation 2T(s) = k ty, where y is the deviation T(s) = Y(s)/R(s), (b) the sensitivity Si, and (c) the
from the equilibrium condition, and T(s) is the vertical steady-state error for a step change in the desired
component of the deviation in tension from the equi- consistency R(s) = A/s. (d) Calculate the value of K
librium condition. The time constant of the motor is required for an allowable steady-state error of 2%.
T = L a/R ir and the linear velocity of the wind-up roll
is twice the angular velocity of the motor, that is, P4.12 Two feedback systems are shown in Figures P4.12(a)
Vo(t) = 2w ()(/). The equation of the motor is then and (b). (a) Evaluate the closed-loop transfer functions
Tj and T 2 for each system, (b) Compare the sensitivities
of the two systems with respect to the parameter K\ for
Eo(s) [r.vw 0 (.y) + WQ(S)] + k 3&T(s), the nominal values of K\ = K 2 = 1.
where AT = a tension disturbance, (a) Draw the
closed-loop block diagram for the system, including
the disturbance AT(.v). (b) Add the effect of a distur-
bance in the wind-off roll velocity AVy(s) to the block "> , K-,
diagram, (c) Determine the sensitivity of the system to J * 5 + 4 s - 1 •*n.v)
the motor constant K m. (d) Determine the steady-
state error in the tension when a step disturbance in
the input velocity, A V x(s) = A/s, occurs. 6
P4.ll One important objective of the paper-making (a)
process is to maintain uniform consistency of the
stock output as it progresses to drying and rolling. A
diagram of the thick stock consistency dilution con- R(s) —K3—*• A> s- 1 •+Y{s)
trol system is shown in Figure P4.11(a). The amount + 4
of water added determines the consistency. The block
diagram of the system is shown in Figure P4.11(b). - 2
Let H(s) = 1 and
(b)
K 1
G,(.v) = G(s) =
8.v + r 3.v + 1' FIGURE P4.12 Two feedback systems.