
Page 320 - Modern Control Systems
P. 320
294 Chapter 4 Feedback Control System Characteristics
/i(/)
Controller
=¾ 0=
Orifice
Capacitance C
«o
Constant = R
(a)
<?3(.v)
H d{s) = 0 Controller
Desired D Error > G(.v) /?Cv + :i H(s)
J?
height V £ w 1 + U Height
variation 1 variation
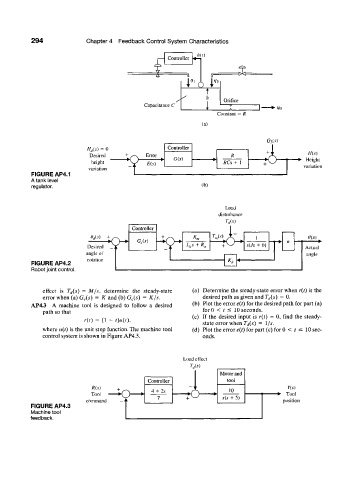
FIGURE AP4.1
A tank level
regulator. (b)
Load
disturbance
Controller
W ; n . G,(.v) "lO - W A-. l rt 0(s)
J w L as + /?„ 5(7.9 + />)
Desired _ j + Actual
angle of angle
rotation
FIGURE AP4.2 **
Robot joint control.
effect is T rI($) = M/s, determine the steady-state (a) Determine the steady-state error when r(t) is the
error when (a) G e(s) = K and (b) G c(s) = K/S. desired path as given and T d(s) = 0.
AP4.3 A machine tool is designed to follow a desired (b) Plot the error e{t) for the desired path for part (a)
path so that forO < t =s 10 seconds.
(c) If the desired input is r(t) = 0, find the steady-
r(t) = (1 - /)«(/),
state error when T d(s) = l/s.
where u(t) is the unit step function. The machine tool (d) Plot the error e(t) for part (c) for 0 < r < 10 sec-
control system is shown in Figure AP4.3. onds.
Load effect
Motor and
Controller tool
R(s) Y(s)
o-
4 + 2.v b/ 10
Tool C - • Tool
7 + s(s + 5)
command position
FIGURE AP4.3
Machine tool
feedback.