
Page 321 - Modern Control Systems
P. 321
Advanced Problems 295
TJs)
Power
Integrator Amplifier
Error I
Control — • ( > — • K
) * s
voltage
Tachometer
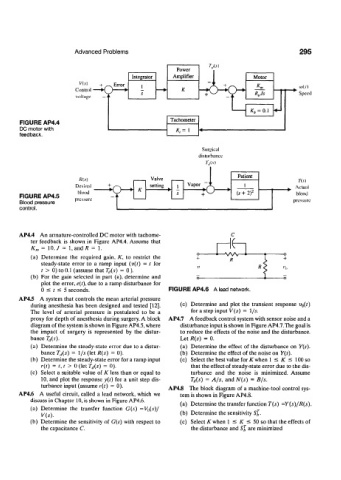
FIGURE AP4.4
DC motor with /:,= 1
feedback.
Surgical
disturbance
7" (/ (.v)
Patient
Y(s)
1
w Actual
(s + 2) 2 blood
FIGURE AP4.5
Blood pressure pressure
control.
AP4.4 An armature-controlled DC motor with tachome-
ter feedback is .shown in Figure AP4.4. Assume that K
K m = 10./ = l.andtf = 1.
(a) Determine the required gain, K, to restrict the R
steady-state error to a ramp input (v(t) = t for
t > 0) to 0.1 (assume that T d(s) = 0).
(b) For the gain selected in part (a), determine and
plot the error, e(t), due to a ramp disturbance for
0 < t < 5 seconds. FIGURE AP4.6 A lead network.
AP4.5 A system that controls the mean arterial pressure
during anesthesia has been designed and tested [12]. (c) Determine and plot the transient response u 0 (0
The level of arterial pressure is postulated to be a for a step input V(s) = 1/s.
proxy for depth of anesthesia during surgery. A block AP4.7 A feedback control system with sensor noise and a
diagram of the system is shown in Figure AP4.5, where disturbance input is shown in Figure AP4.7.The goal is
the impact of surgery is represented by the distur- to reduce the effects of the noise and the disturbance.
bance T d(s). Let R(s) = 0.
(a) Determine the steady-state error due to a distur- (a) Determine the effect of the disturbance on Y(s).
bance T tl(s) = \/s (let R(s) = 0). (b) Determine the effect of the noise on Y(s).
(b) Determine the steady-state error for a ramp input (c) Select the best value for K when 1 < K s= 100 so
/-(0 = t, t > 0 (let T d(s) = 0). that the effect of steady-state error due to the dis-
(c) Select a suitable value of K less than or equal to turbance and the noise is minimized. Assume
10, and plot the response y(t) for a unit step dis- 7* rf (s) = A/s, and N(s) = B/s.
turbance input (assume r(t) = 0).
AP4.8 The block diagram of a machine-tool control sys-
AP4.6 A useful circuit, called a lead network, which we tem is shown in Figure AP4.8.
discuss in Chapter 10, is shown in Figure AP4.6.
(a) Determine the transfer function T(s) =Y(s)/R(s).
(a) Determine the transfer function G(s) =V {)(s)/
V(s). (b) Determine the sensitivity Sj.
(b) Determine the sensitivity of G(s) with respect to (c) Select K when 1 < K < 50 so that the effects of
the capacitance C. the disturbance and s£ are minimized