
Page 325 - Modern Control Systems
P. 325
Design Problems 299
U)
TM
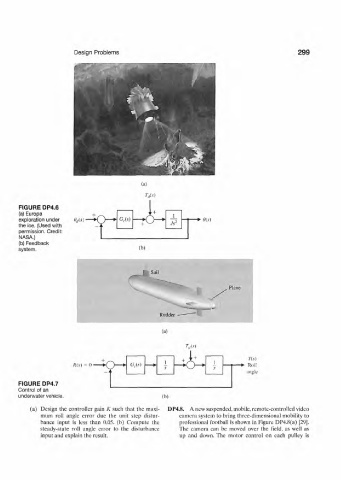
FIGURE DP4.6
(a) Europa
exploration under BA.s) —; t > Bis)
the ice. (Used with
permission. Credit:
NASA.)
(b) Feedback
system. (b)
(a)
TM)
>'(.v)
R(x) = 0 -*• Roll
^
FIGURE DP4.7
Control of an
underwater vehicle. (h)
(a) Design the controller gain K such that the maxi- DP4.8. A new suspended, mobile, remote-controlled video
mum roll angle error due the unit step distur- camera system to bring three-dimensional mobility to
bance input is less than 0.05. (b) Compute the professional football is shown in Figure DP4.8(a) [29].
steady-state roll angle error to the disturbance The camera can be moved over the field, as well as
input and explain the result. up and down. The motor control on each pulley is