
Page 329 - Modern Control Systems
P. 329
Terms and Concepts 303
W
Controller Process
s+l 1
R(s) • Q •
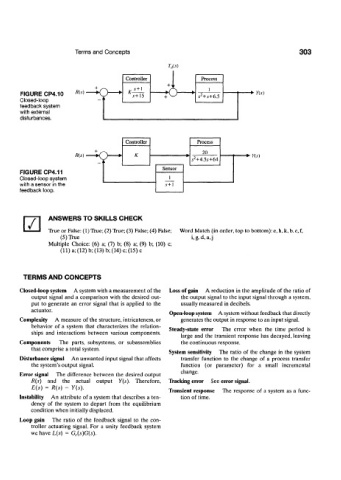
FIGURE CP4.10 s+\5 tO .s +.v+6.5 -+Y(s)
2
Closed-loop
feedback system
with external
disturbances.
Controller Process
20
^ fc K • YU)
2
J * s +4.5s+64
i
Sensor
FIGURE CP4.11
Closed-loop system 1
with a sensor in the .v+l
feedback loop.
ANSWERS TO SKILLS CHECK
m True or False: (1) True; (2) True; (3) False; (4) False; Word Match (in order, top to bottom): e, h, k, b, c, f,
(5) True i,g,d,a,j
Multiple Choice: (6) a; (7) b; (8) a; (9) b; (10) c;
(ll)a;(12)b;(13)b;(14)c;(15)c
TERMS AND CONCEPTS
Closed-loop system A system with a measurement of the Loss of gain A reduction in the amplitude of the ratio of
output signal and a comparison with the desired out- the output signal to the input signal through a system,
put to generate an error signal that is applied to the usually measured in decibels.
actuator.
Open-loop system A system without feedback that directly
Complexity A measure of the structure, intricateness, or generates the output in response to an input signal.
behavior of a system that characterizes the relation- Steady-state error The error when the time period is
ships and interactions between various components.
large and the transient response has decayed, leaving
Components The parts, subsystems, or subassemblies the continuous response.
that comprise a total system.
System sensitivity The ratio of the change in the system
Disturbance signal An unwanted input signal that affects transfer function to the change of a process transfer
the system's output signal. function (or parameter) for a small incremental
change.
Error signal The difference between the desired output
R(s) and the actual output Y(a). Therefore, Tracking error See error signal.
E(s) = R(s) - Y(s).
Transient response The response of a system as a func-
Instability An attribute of a system that describes a ten- tion of time.
dency of the system to depart from the equilibrium
condition when initially displaced.
Loop gain The ratio of the feedback signal to the con-
troller actuating signal. For a unity feedback system
we have L(x) = G c(s)G(s).