
Page 334 - Modern Control Systems
P. 334
308 Chapter 5 The Performance of Feedback Control Systems
and the steady-state response is
y(oo) = 0.9.
If the error is E(s) = R(s) — Y(s), then the steady-state error is
= lim sE(s) = 0.1.
e ss
5.3 PERFORMANCE OF SECOND-ORDER SYSTEMS
Let us consider a single-loop second-order system and determine its response to a
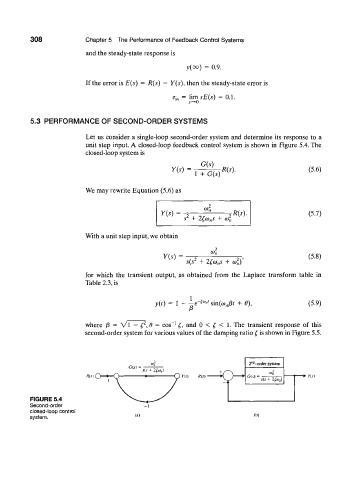
unit step input. A closed-loop feedback control system is shown in Figure 5.4. The
closed-loop system is
G(s)
(5.6)
1 +G(s)
We may rewrite Equation (5.6) as
W
Y(s) = " P(,\ (5.7)
2 _L o r , 2 A ^ *
sr + 2£a) ns + o)„
With a unit step input, we obtain
0),
Y(s) = 2 (5.8)
s(s + 2£a)„s + to},)'
for which the transient output, as obtained from the Laplace transform table in
Table 2.3, is
y(t) = l - je-to smfafit + 0), (5.9)
2 l
where /3 = £ , 0 = cos £, and 0 < £ < 1. The transient response of this
second-order system for various values of the damping ratio £ is shown in Figure 5.5.
1
2"' -order system
o~
R(s) Y(s) R{s) GU) = s(s + 2£a>„) -*• Y{s)
FIGURE 5.4
Second-order
closed-loop control
system. (a) (b)